实现大面积室外精准定位并解决割草难题,「优思美地」面向欧美市场提供割草机器人一体化解决方案
作者|韦世玮
编辑|石亚琼
**
随着AI感知、定位、导航和驱动等技术的不断发展成熟,机器人已经在越来越多的场景中得到应用,并延伸出了各种细分的功能品类。日前,36氪接触到的「优思美地」则是一家开发割草机器人的公司。
优思美地成立于2021年,主要基于RTK GPS(实时动态测量定位技术)的多传感器融合算法,为海外市场提供割草机器人一体化解决方案,可替代人工实现精细化、自动化割草的远程控制。据了解,公司创始团队早在2018年起就已开始研究割草机器人,并在2020年正式启动了智能割草机系统的研发,如今已成功开发超过20款产品。
割草看似一件低劳动成本、稀松平常的工作,但实际上是一个存量巨大且占有率分散的市场。据市场研究机构Grand View Research数据,2019年全球割草机市场规模为285亿美元(约1817亿人民币),预计到2027年将达441亿美元(约2812人民币),2020年-2027年的年均复合增长率达5.6%。
优思美地创始人李建勇告诉36氪,割草机已经是一个成熟的市场,全球一年出货量高达2500万台,其中北美市场出货规模约860万台,主流使用场景为家用草坪的打理。但绝大部分仍属于汽油动力的割草机,需要人工操作,而智能割草机的使用率接近为0。
在割草机市场需求增长和智能化不足的环境下,割草机市场正迎来两个发展趋势,一是在动力方面将汽油动力切换为锂电动力,二是在操作方面由人工操作变为机器智能操作,实现无需人工干预的全自动割草。
因此,优思美地主要面向国外市场,为终端品牌提供割草机器人整体解决方案。与现有的埋线式割草机器人方案相比,公司的割草机器人能够实现完整多进程处理,采用高精度卫星定位,解决草坪打滑、复杂边界、大面积、避障等问题。同时,用户只需在手机端一键控制,就能让割草机器人智能完成割草工作,还可进行远程监控并设定工作时间。
从技术角度看,优思美地割草机器人拥有RTK GPS算法、异构孪生高精度地图、多天线技术、长距离通信技术、智能规划路径等核心技术,其中公司的大系统工程化能力最为核心,能将不同模块高度融合,从工程化角度控制成本优势。
割草机器人作为一项面向室外应用的多传感器融合慢速自动驾驶系统,具有技术点多、系统复杂、场景复杂等特点。例如,它包含了从自动驾驶相关的感知、规划、决策等智能子系统,到定位、通信及运动控制等核心模组,这对团队系统架构和技术能力是一个巨大的挑战。
同时割草机器人面向家庭海量发货的市场,对产品成本的要求十分严格。在李建勇看来,只有成本达到足够竞争力的产品,才能快速获得客户认可。
针对这些挑战,优思美地有着不可小觑的人才优势。公司拥有一支RTK GPS模组和专家团队,涉及RTK算法、GPS接收机、中射频、RTK&IMU传感器融合算法等多领域技术,他们在过往十余年中累计立项管理的硬科技产品研发支出超50亿人民币,在驾驭大型复杂多领域综合性产品的研发上有深厚的积累和经验。
其中,公司创始人李建勇为东南大学自动控制硕士,曾任职于国内头部通信企业等公司,并参与了无线LTE预研、基带产品研发、基带芯片立项管理等项目,共拥有6项发明专利和3项PCT。
核心团队的优势让公司能够从底层核心技术开始重新构建算法,在降低技术成本的同时,实现系统级算法增强,从而让产品性能提升到业内领先水平。

优思美地割草机器人
具体来看,优思美地割草机器人的核心优势在于解决了“割干净”和“大面积成本”两大难点。
1、“割干净”优势
由于室内和室外工作环境差异大,室外草坪通常会遇到雨后露水打滑、地面高低不平、颠簸等问题,这些都是室内机器人难以解决的问题,对机器人定位技术提出了更严格的要求。
目前,业内智能割草机器人在定位方面主要有两种技术方案,一是基于惯性导航的埋线式方案,二是非埋线式方案。
简单地说,埋线式方案是当下主流的技术方案,如宝时得、博世、富世华等公司均采用这一解决方案。该方案的优势是成本较低,但缺点在于无法实现精准定位,导致出现了割不干净的问题。同时,埋线式割草机器人部署人工埋线成本高,约200欧元-400欧元,成本还会随着草坪面积增大而增加,且耗时长、布置灵活性差。因此,埋线式方案在大面积草坪的割草效果并不理想。
相比之下,优思美地采用的非埋线方案能够解决精准定位问题,采用RTK GPS技术为主导,并综合IMU和视觉等其他传感器融合算法,形成了一套新的定位解决方案。不过,RTK GPS技术存在的问题是,若机器人工作时遇到树木遮挡,其定位信号会减弱甚至丢失,或是其靠近房屋时,无法解决信号反射出现的多径效应问题。
因此,公司针对定位问题提出了两种解决方式,一是能够直接抑制信号多径问题,从中找出最短的工作路径;二是如果多径抑制效果不好,还可以通过其他传感器实现协同定位,例如用计算机视觉方案与GPS进行融合,解决信号定位问题。
2、解决“大面积成本”问题
与欧洲相比,北美家庭的草坪面积更大,往往多达上千平米,因此割草机器人在解决大面积草坪的精确定位问题时,也必须要保证成本可控,减少用户在机器人工作后的补割成本。
李建勇谈到,其实非埋线解决方案还细分了三个技术路径,分别为多点定位方案、RTK GPS方案、视觉方案。其中,多点定位方案能够解决大面积定位问题,但难以控制成本的上涨;视觉方案看起来很美好,但最大问题是其面向海量发货市场的商用落地时间不可控;而RTK GPS方案的成本有进一步下降的空间,可同时实现成本可控、性能可控。
此外,成本也是割草机器人商业落地过程中至关重要的环节。李建勇提到,公司计划强化研发投入,在核心技术模组上打造底层技术竞争力,从而实现在业界的性能和成本领先,将关键模组和元器件的成本从千元级别降低至百元级。
商业模式方面,目前优思美地主要包括高电压、大功率无刷电机控制器,以及一整套智能割草机控制系统,后者包括导航定位、地图路径规划、电控外围设备等。
其中,公司智能割草机控制系统预计明年上半年首批搭载出货,将优先落地To B市场,借助传统品牌的路径来铺量,完成存量市场的升级换代,赋能传统制造业企业赶上机器人时代,实现产业链升级。
接下来,优思美地将进一步扩充团队,加大核心模组的研发力度,以及产品备货、专利升级等方面的投入。
[注:本文部分图片来自互联网!未经授权,不得转载!每天跟着我们读更多的书]
互推传媒文章转载自第三方或本站原创生产,如需转载,请联系版权方授权,如有内容如侵犯了你的权益,请联系我们进行删除!
如若转载,请注明出处:http://www.hfwlcm.com/info/289099.html
相关文章
-

作为占据我们养殖成本百分之70%的饲料价格不断上涨,给咱们养殖带来了很大的压力,养牛羊想挣钱?那还是赶紧从降低饲料的成本做起来吧。如何去降低养殖成本也是不少养殖户关心
-

乱喂牛料成本高,效果却不一定好。许多新手在给牛喂食时,不知道如何选择饲料,什么有用、什么没用都喂了,浪费了很多钱。在这里,我想和大家分享一下如何选择饲料,希望能对
-
若谈起养殖业,消费者们肯定对当前饲料养殖的畜禽品嗤之以鼻,其实想法是有点偏激的。比如潲水猪和饲料猪代表着不同的时代,不管是以前落后的饲养还是现在科学的养殖,都是需
-

查猪价、每天更新规模猪场管理技术课件,点击右上角,关注→牧业百科养猪成本费用分析 要提高养猪场的经济效益,需要对养猪场进行精细管理,降低养猪场的生产成本非常重要。
-

养鹅的过程中如何制造科学的喂料设备和饮水设备?在农村里面养殖,那么对于投放饲料的一个设备和饮水的设备,假如能够设计得比较妥当。那么在养殖过程当中会节约很多原材料。
-
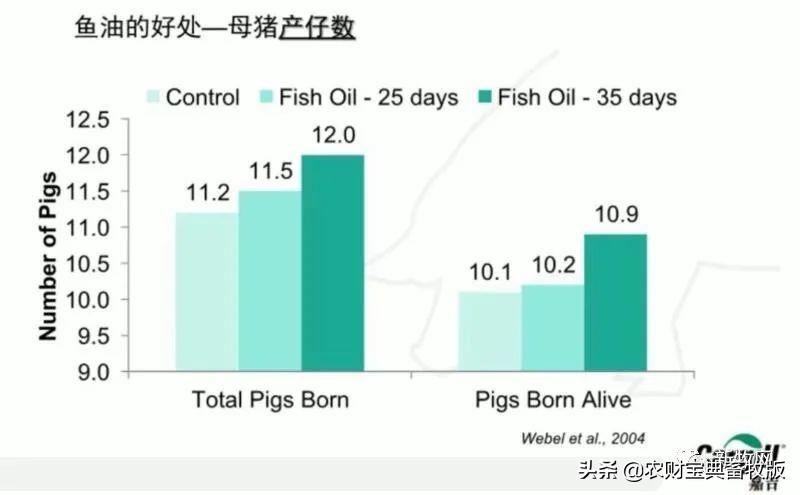
《农财宝典》新牧网记者/王文强 统筹/彭进鱼粉价高质“忧”,鱼粉替代研究30年仍然是一道难关?(点击前面蓝色字体回顾详情)面对鱼粉价高质“忧”的产业痛点,业内研究30年仍然
-
进入下半年以来,生猪价格不断突破高点,在国庆节后的常规淡季,鸡蛋售价也呈现“淡季不淡”的明显上升趋势。下游肉蛋进入销售旺市,在养殖行业的上游,饲料也迎来了产销齐涨
-

我国农机产品价格低,以至于有些外资企业不得不放弃中小型农机产品的生产。其主要原因,是我国农机零部件社会化集聚生产,不但价格低廉,产品质量也不错。一、零部件质量不错